 Lei oss
Lei oss


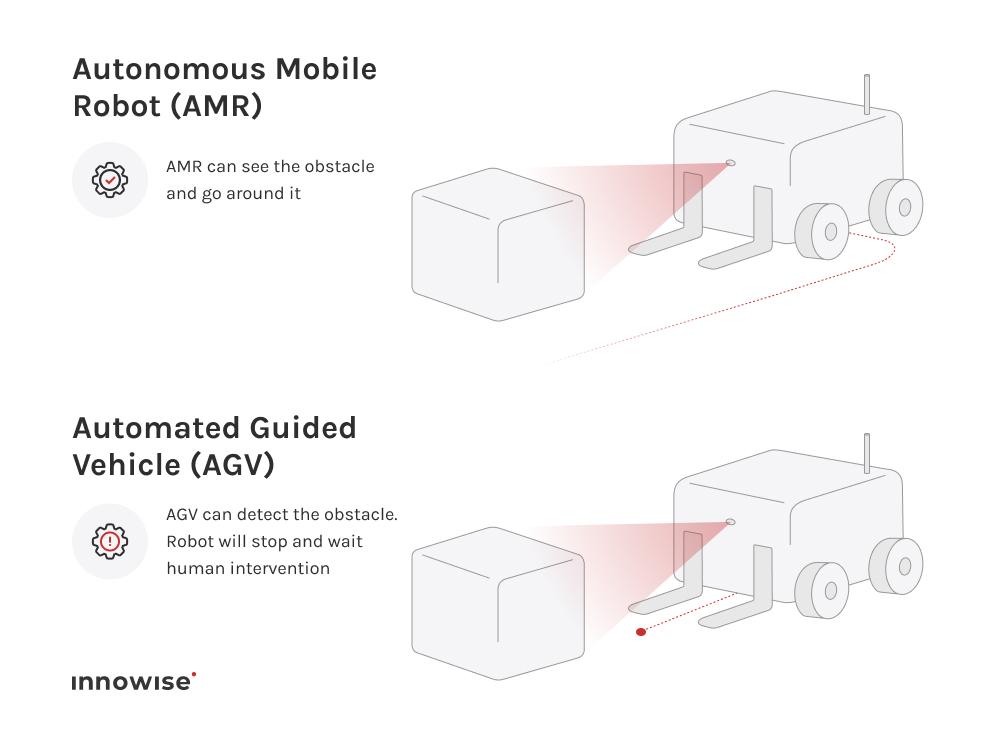
AGV-er koster mindre per robot, men krever installasjon av infrastruktur, noe som tar flere uker og koster mer. AMR-er koster mer på forhånd, men de kan settes opp raskt uten ytterligere installasjoner, så totalprisen vil avhenge av hvor mange ganger lageroppsettet skal endres i fremtiden.











Takk skal du ha!
Meldingen din er sendt.
Vi behandler forespørselen din og kontakter deg så snart som mulig.

